地図を使ったサービスを考える場合はGoogle Mapを使用しますが、
「$200 usage every month for no charge. That’s 28,500 maploads per month for no charge. 」
(https://mapsplatform.google.com/pricing/?hl=ja)
とあり、有名サイトになった場合には、有料になります。
そこで地図のオープンデータの使用を考えてみよう・・・・
OpenStreetMap(OSM)は、誰でも自由に地図を使えるよう、みんなでオープンデータの地理情報を作るプロジェクトです。
https://openstreetmap.jp
「OpenStreetMapとその協力者をクレジットすれば、データを自由にコピー、配布、送信、利用することができます。変更したり翻案したりしたデータは同じライセンスに従う場合のみ、提供することができます。」
Googleマップのようにマーカーを付けることが可能。
https://www.openstreetmap.org/?mlat=緯度&mlon=経度
弊社の位置だと、こちら。
https://www.openstreetmap.org/?mlat=35.70010&mlon=139.77402
ZOOMしたい場合は、URLに#map=ズームの数/緯度/経度を追加。
https://www.openstreetmap.org/?mlat=35.70010&mlon=139.77402#map=17/35.70010/139.77402
埋め込みも可能。
大きな地図を表示
公開されているGPSトラッキングが見えるので、精度の悪いGPS端末があるとズレることはあるが参考値としてはよいと思う。
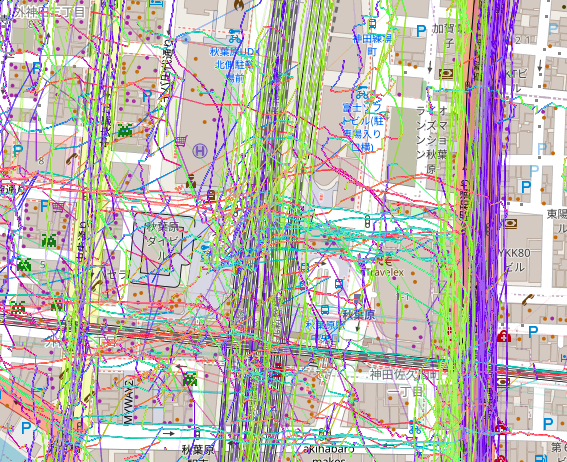
弊社秋葉原駅付近のトラッキングデータ。
“Base map and data from OpenStreetMap and OpenStreetMap Foundation”